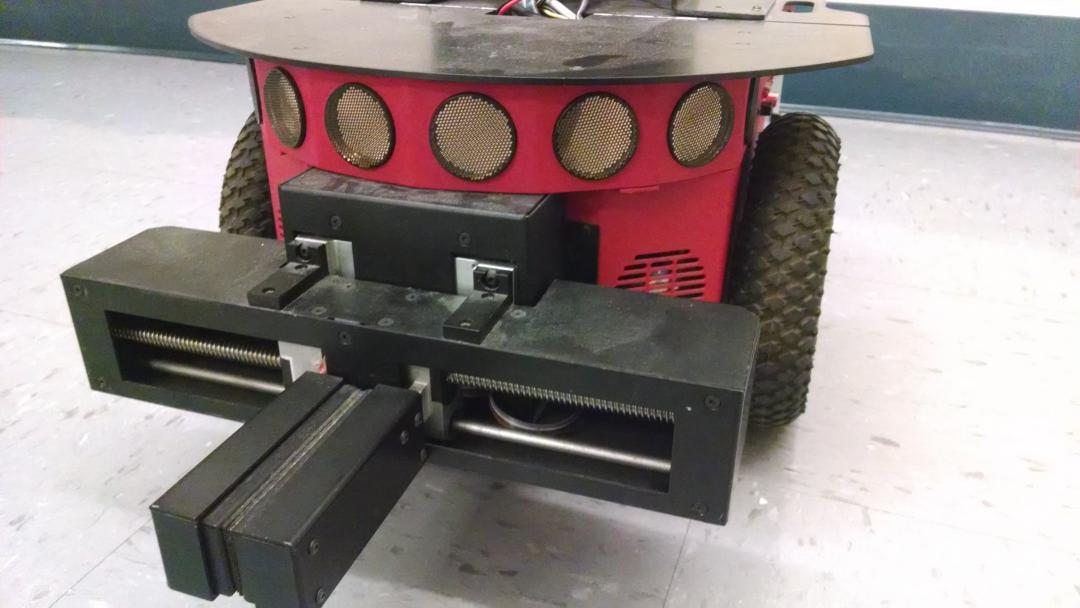
The Sample Return Robot (SeRR) is being developed by a group of Computer Science Engineering Students from the University of Nevada, Reno. The project will use the Pioneer 2 robot and an Asus Xtion Live Sensor to create a system that can discover, collect, and return samples.
The goal of this project is to compete in the NASA sponsored Sample Return Challenge (SRRC). A contest held once a year on the campus of Worcester Polytechnic Institute in Worcester, MA. The robot is to discover, collect, and return pre-defined samples to a home base.
Geologic sampling is used in multiple research platforms, including lunar, martian, geological and underwater sampling. Researchers currently must travel to test sites to retrieve samples, which can be hazardous and costly. Autonomously collecting samples frees valuable research resources. GPS in remote locations can be unreliable, and uses a large amount of power. Using tools like dropping cookies, positioning sensors, and a home beacon, this project aims to develop an autonomous robotic navigation system that would allow the robot to operate independent of GPS. A successful robot will navigate from a home base, collect and return samples and resume searching.